点云采集系统
多目+旋转激光稠密点云采集系统
本项目为基于多目相机+旋转2D激光雷达的稠密彩色激光点云采集设备(专利号:202110964419.9),设备间标定使用基于AprilTag辅助的特征点优化。
采集流程为:
- *系统参数标定
- 激光点云采集
- 激光点云拼接
- 多目图像采集
- 点云着色
- 点云拼接
*代表只需完成一次即可,不需要重复进行
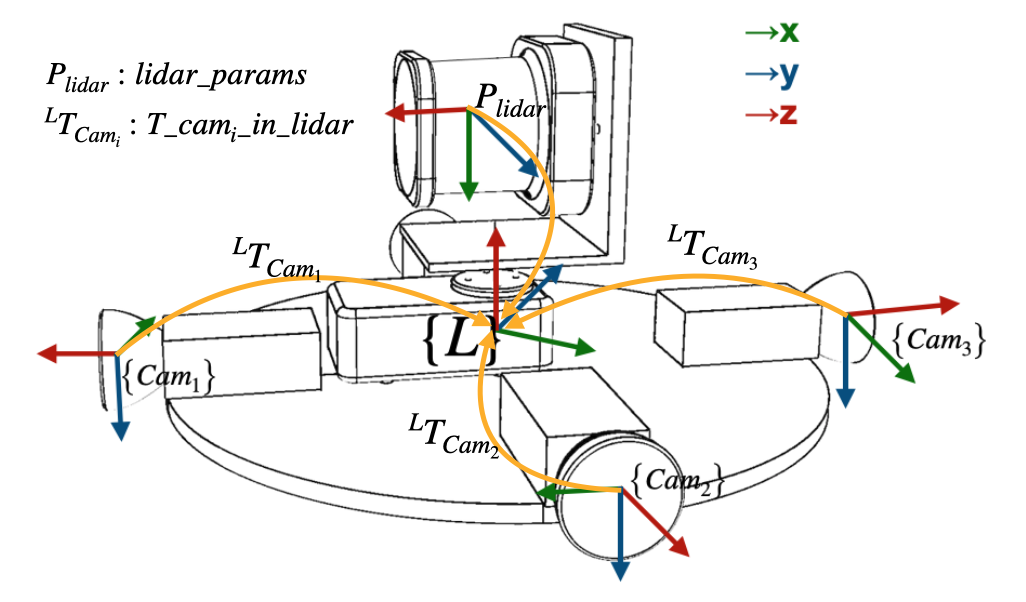
整套系统的示意图如下图所示:
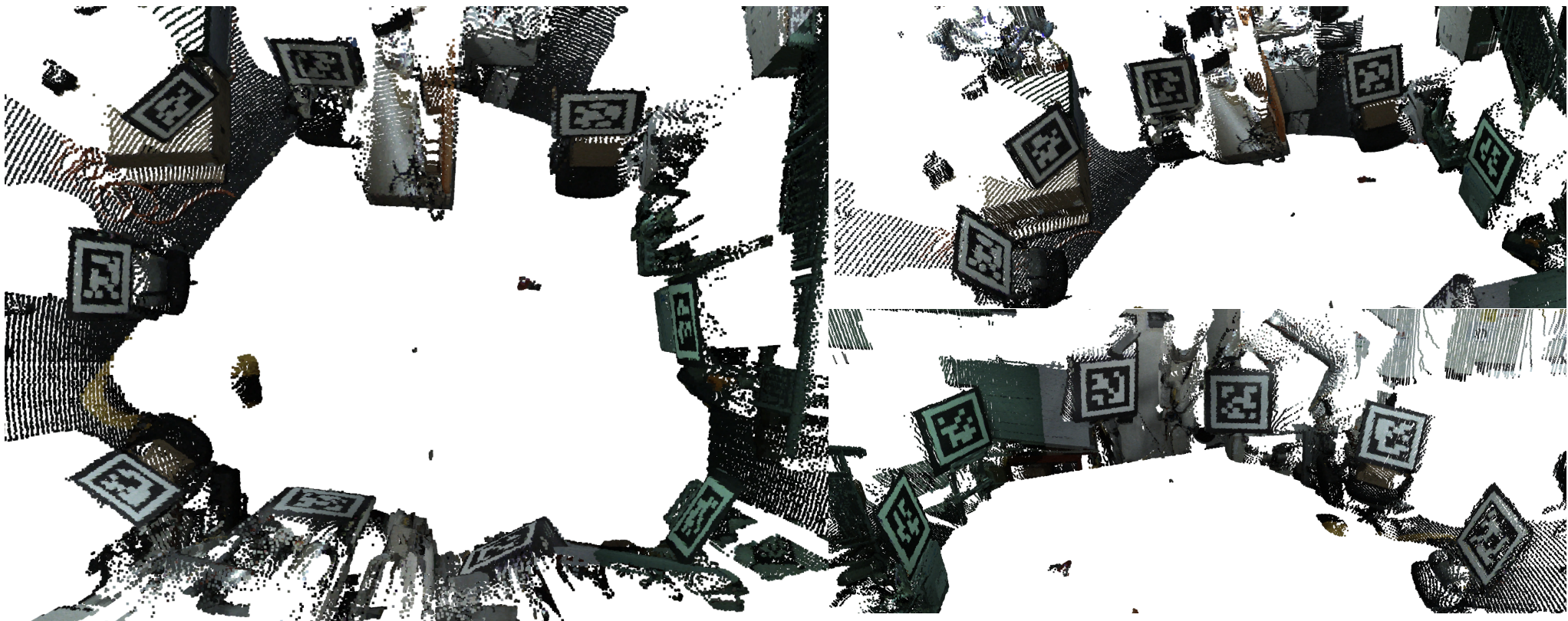
标定借助AprilTag进行,场景示意图如下:
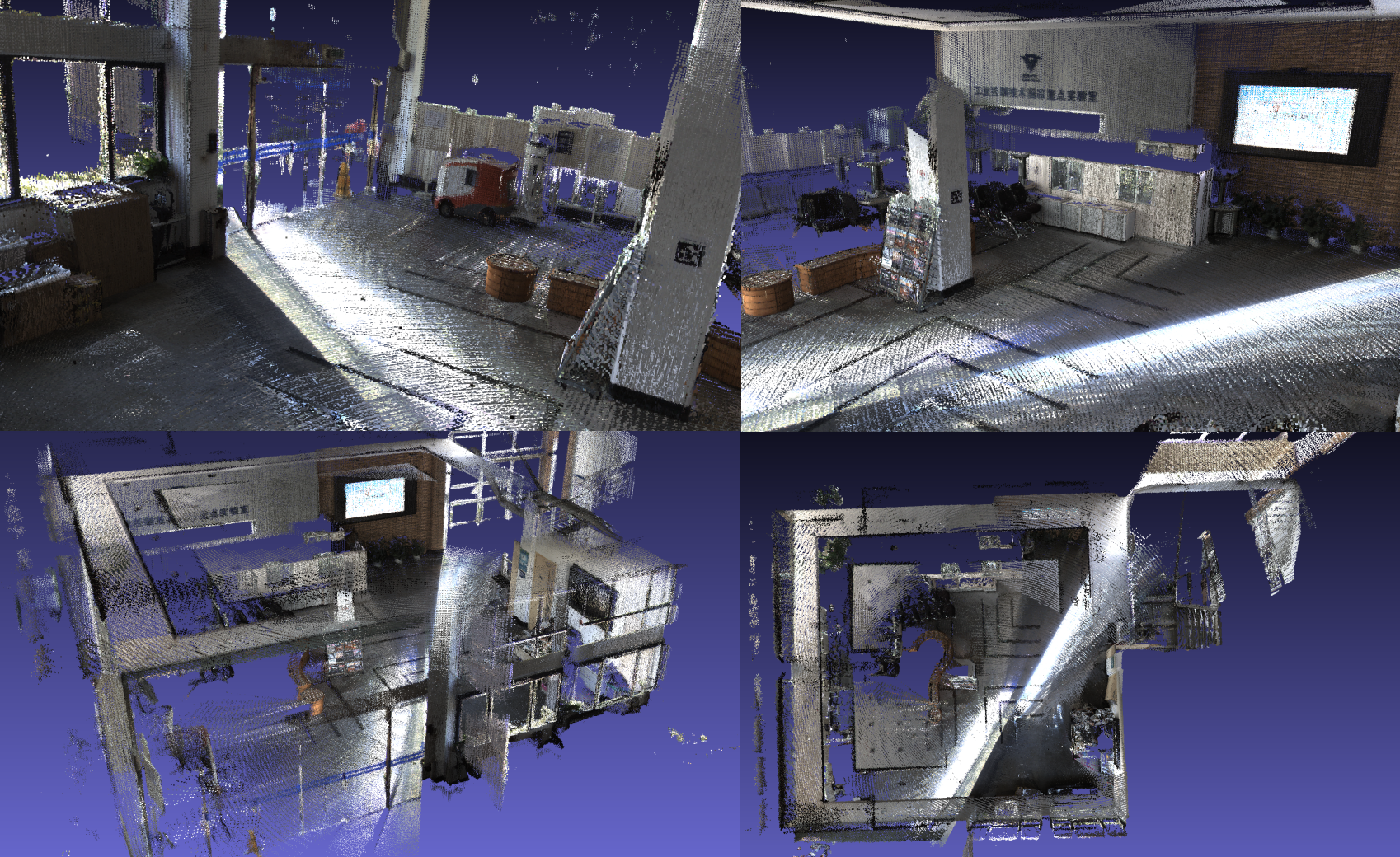
在室内环境的采集结果:
结果点云可下载:
多目+旋转激光稠密点云采集系统
本项目为基于多目相机+旋转2D激光雷达的稠密彩色激光点云采集设备(专利号:202110964419.9),设备间标定使用基于AprilTag辅助的特征点优化。
采集流程为:
*代表只需完成一次即可,不需要重复进行
整套系统的示意图如下图所示:
标定借助AprilTag进行,场景示意图如下:
在室内环境的采集结果:
结果点云可下载: